Featured
Updated on
XRP-III (Experimental Robotics Platform)
XRP is an experimental robotics project that has been in progress for a long while. What I’m focusing on:
- Designing and building a robot in the first place
- Almost fully 3D printed architecture
- Tracks, because they’re suitable for almost any terrain and are more interesting than tires
- Easy to build and service
- This is a platform that I want to eventually extend with cameras, a robot arm, or other peripherals
XRP-I
This was a primitive prototype (a long time ago) that has since been decommissioned and disassembled. No pictures, sorry.
XRP-II
The second iteration of XRP runs on the KS5016 Keyestudio ESP32 PLUS development board. It’s controlled by connecting to the ESP32’s WiFi access point, then accessing a local webpage where a joystick can be used to drive it.
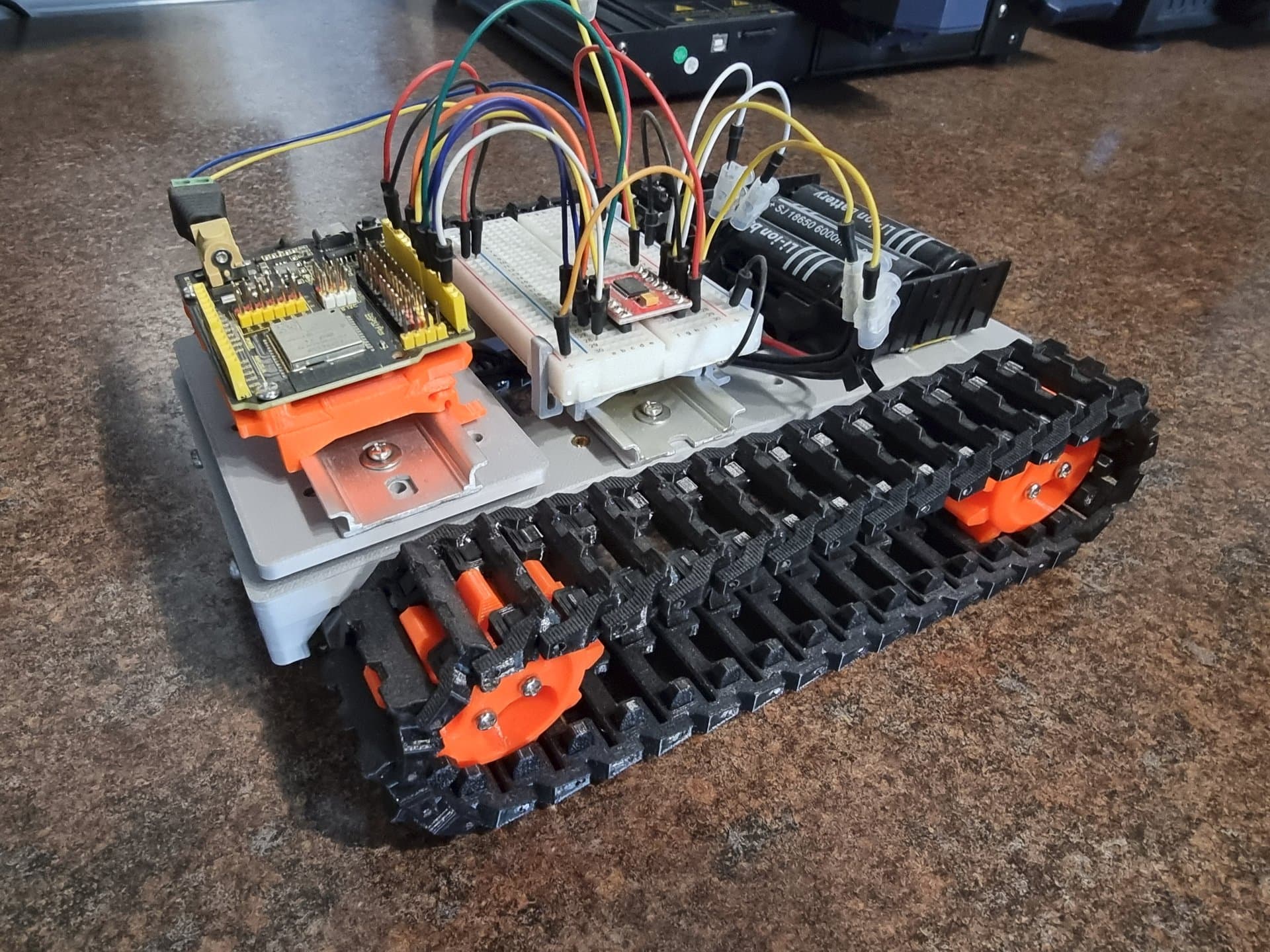
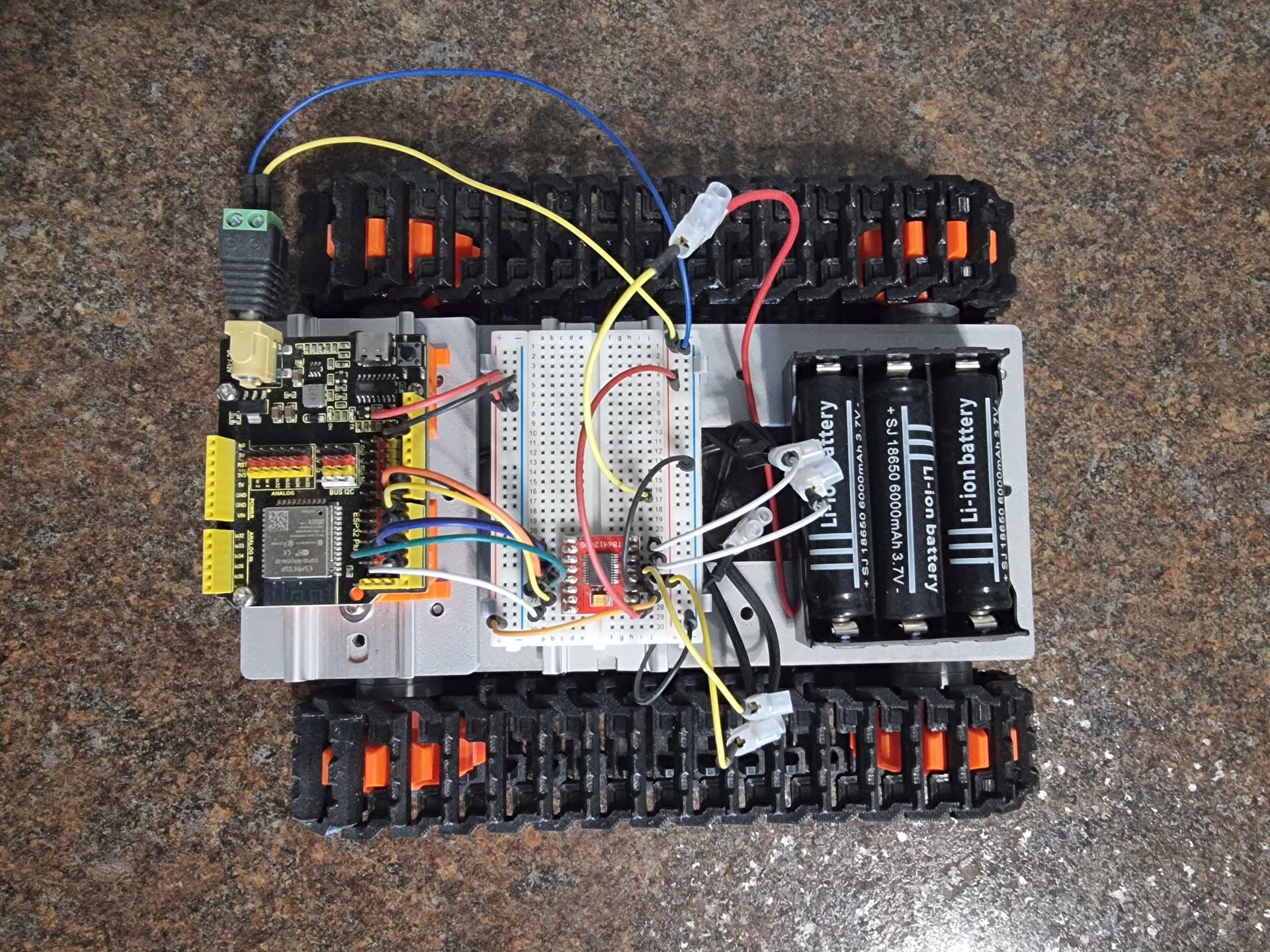
The ESP32 and the breadboard are mounted on DIN rails with my self-developed DIN mount system.
Unfortunately, the motors are slow and lack power. The ESP32 and control system can also be improved a lot. This will be addressed in XRP-III.
XRP-III
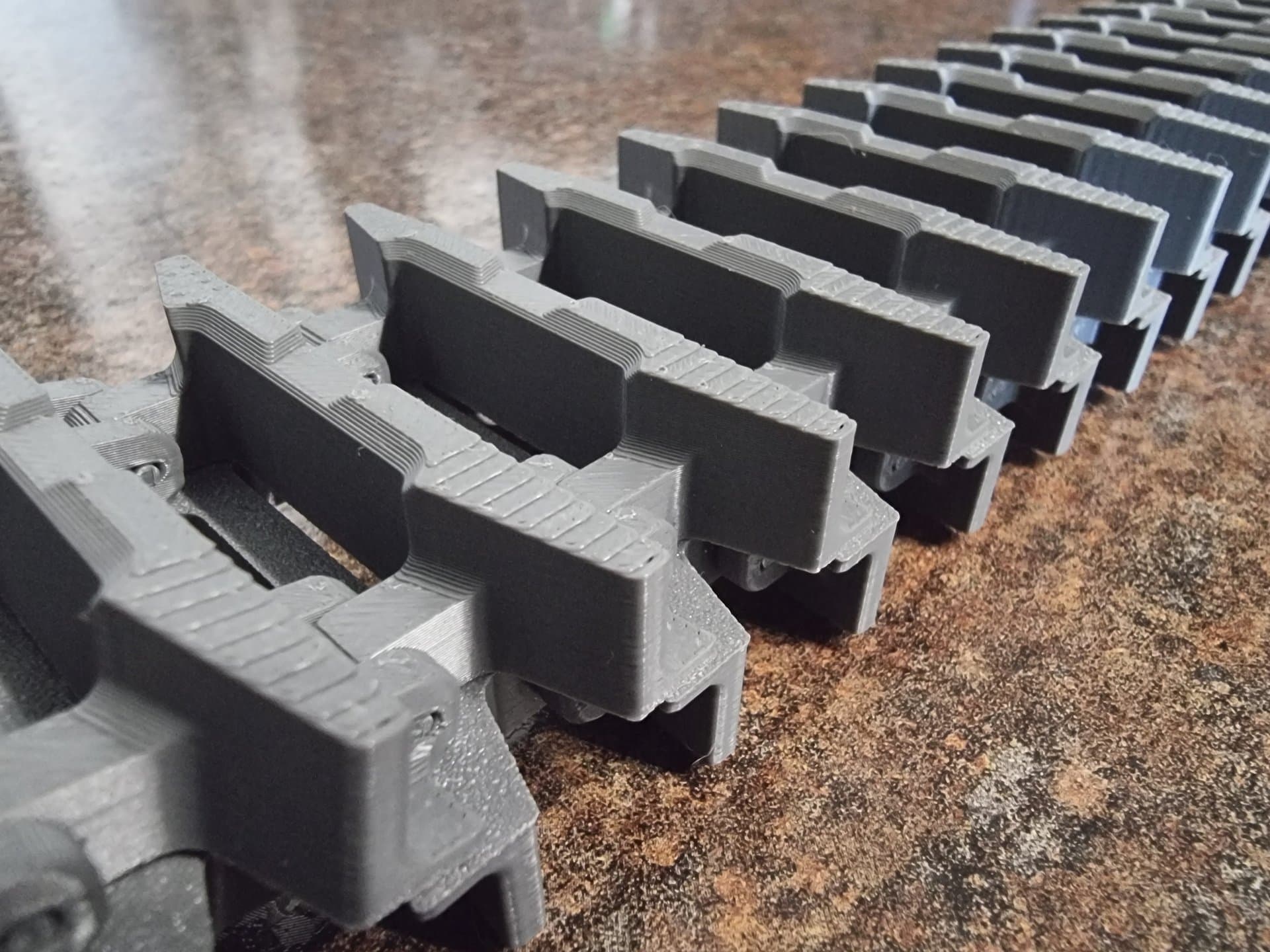
Newer, bigger, better. I’ve already designed and printed the tracks. The next step is to find suitable BLDC motors, then develop the drive system and chassis.

XRP-III will be powered by full Linux distribution running on my old Raspberry Pi 2B SBC. I’m planning to control it via IP with video streaming from a webcam.
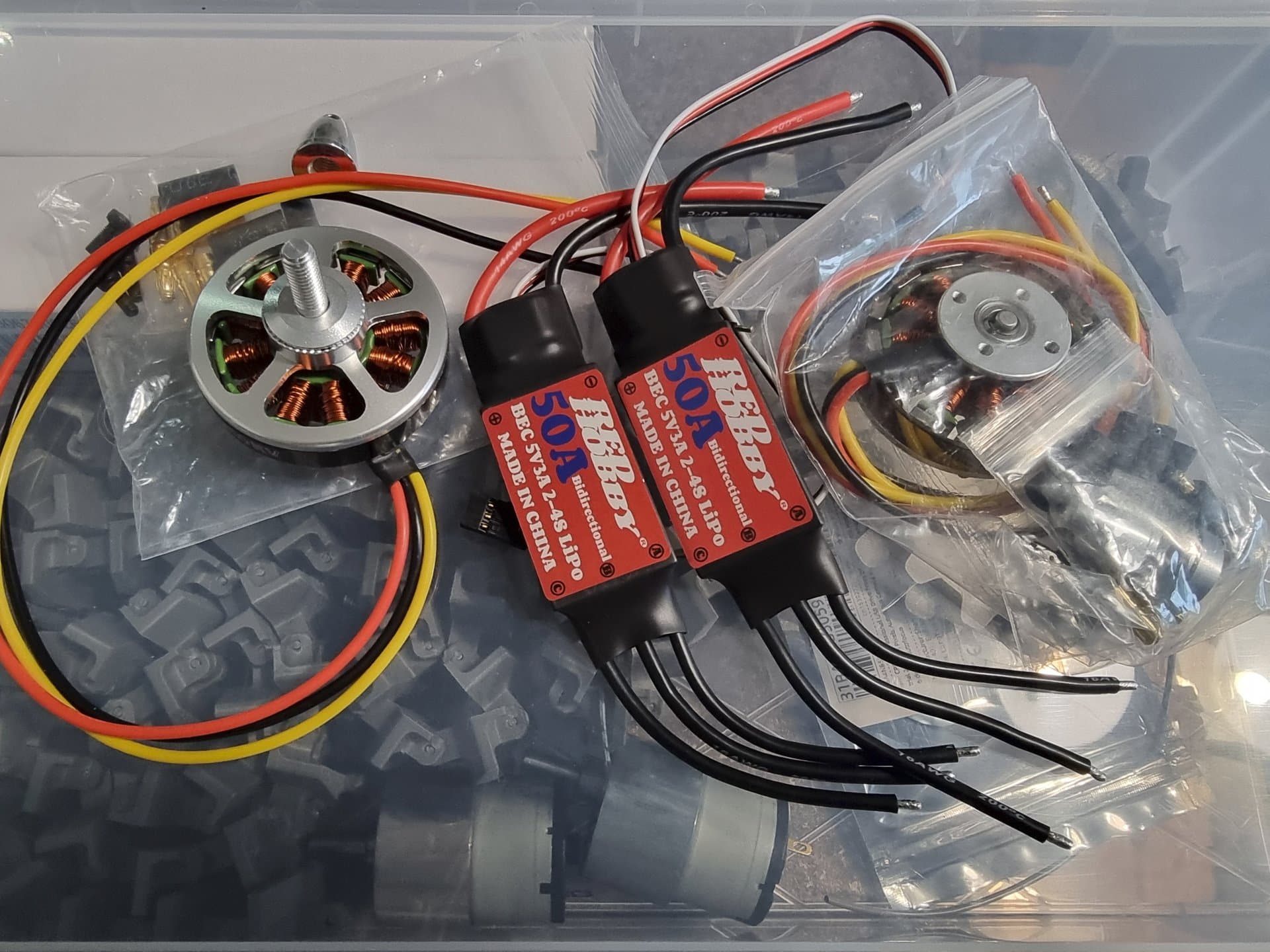
The 5010 BLDC motors and bi-directional 50A ESCs already arrived: